Advanced Decision Making with HTN Planning
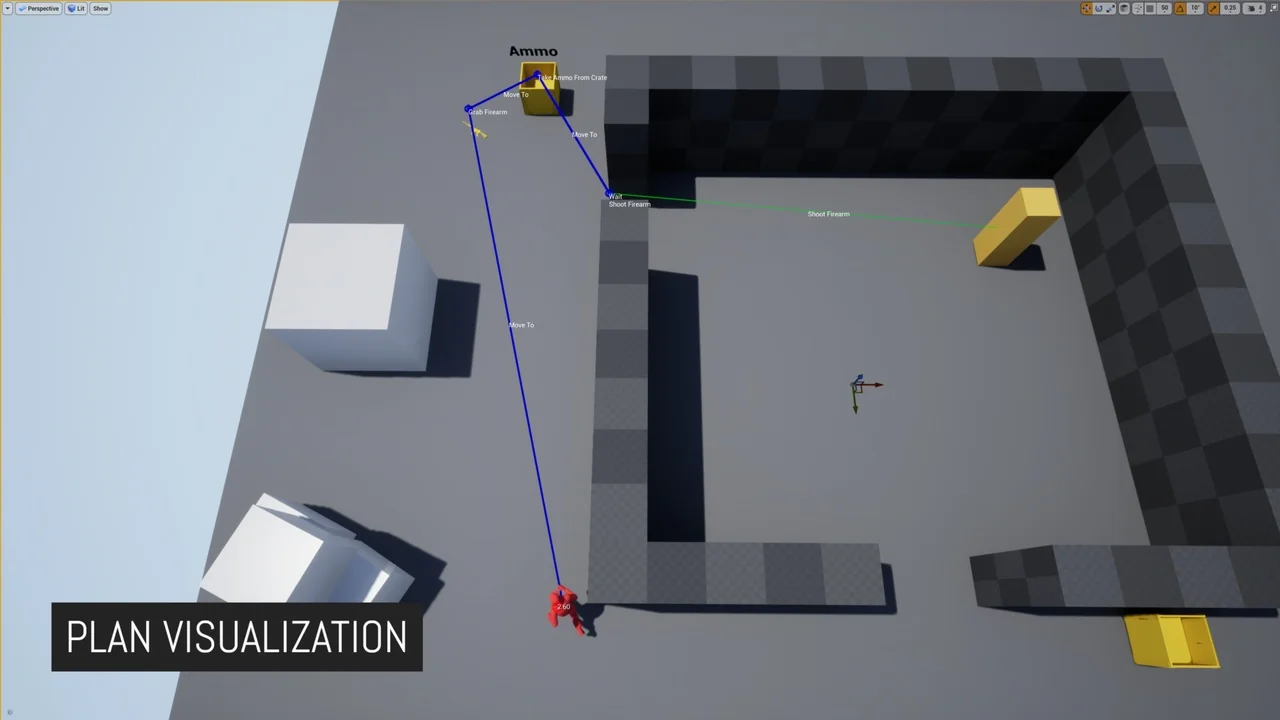
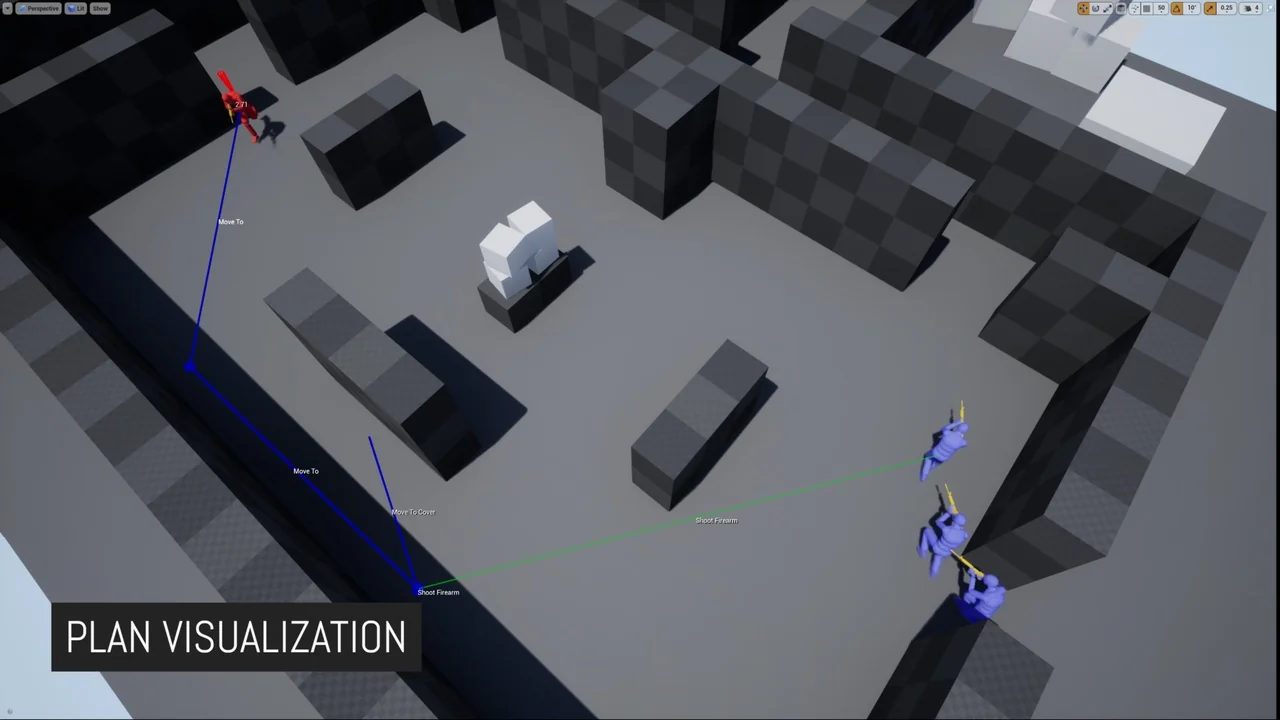
Hierarchical Task Network Planning AI is a powerful tool designed for creating intelligent characters that can think several steps ahead. By predicting the consequences of their actions, these AI entities can invent optimal plans for complex scenarios. For instance, the system can manage tactical combat in FPS arenas or coordinate sophisticated attack strategies against specific targets.
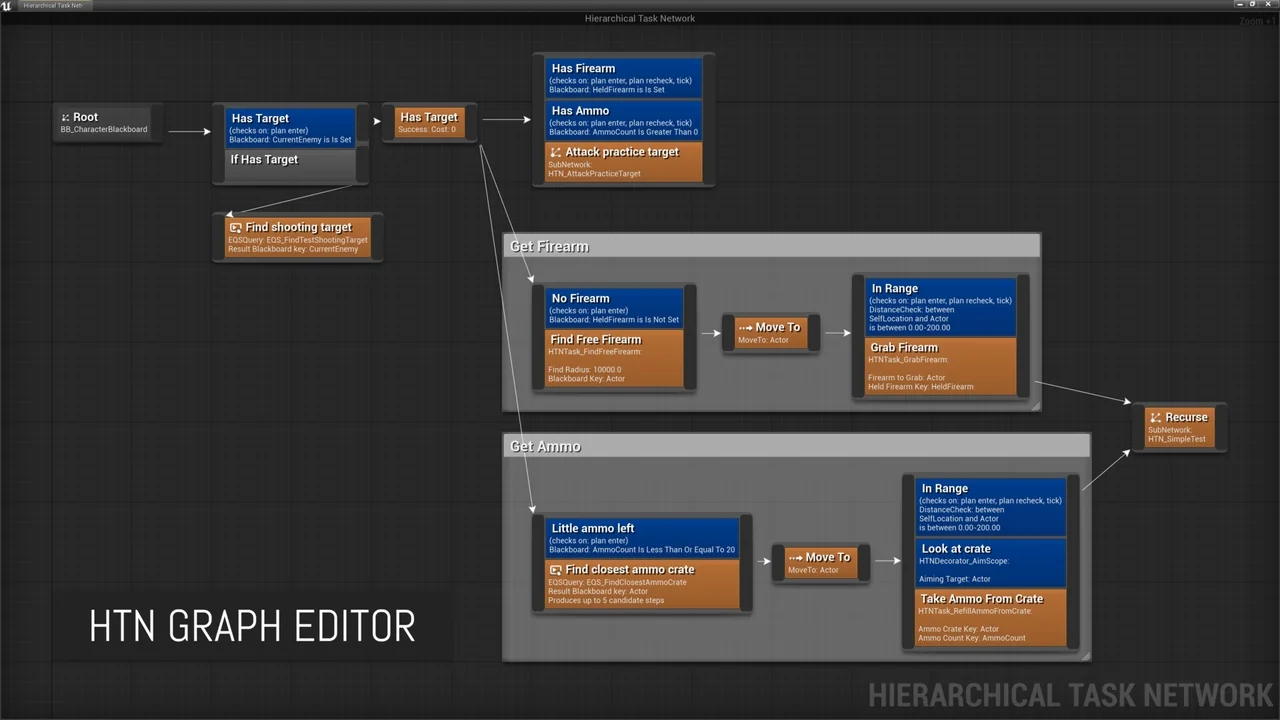
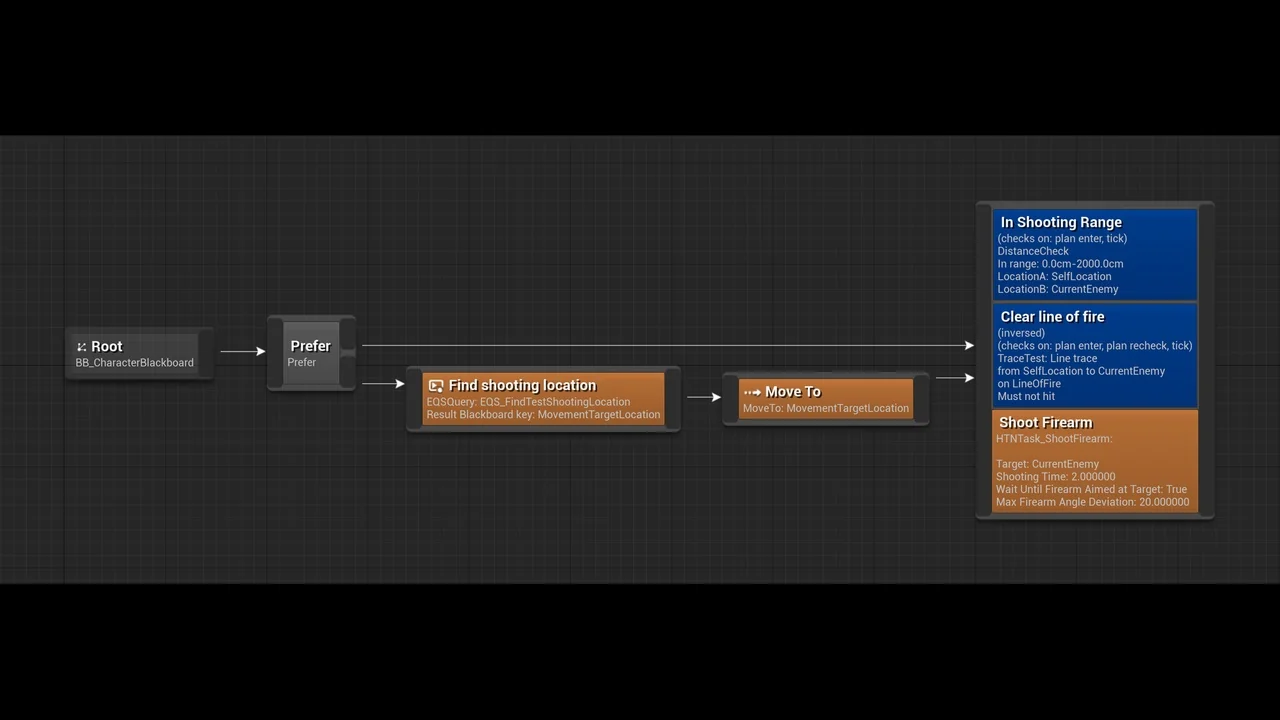
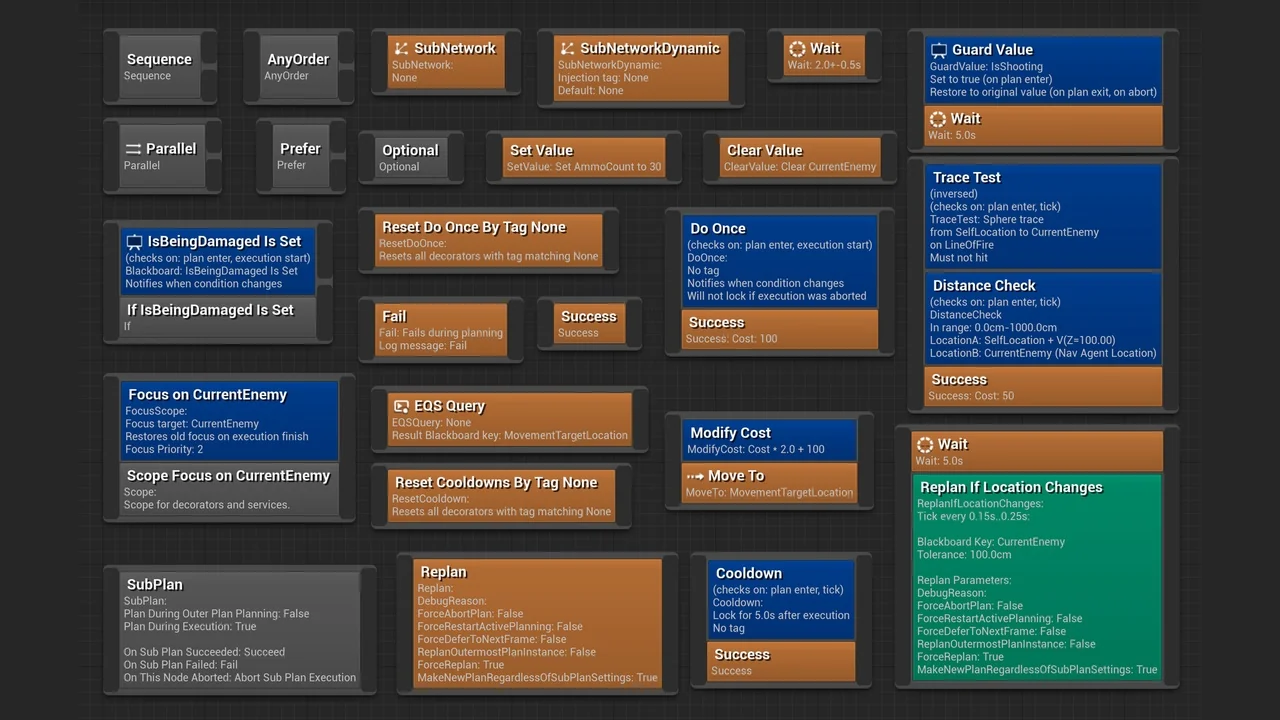
The plugin features a visual node-based graph editor that will feel familiar to those who use standard Behavior Trees. Consequently, developers can easily create custom Tasks, Decorators, and Services using either C++ or Blueprints. This accessibility ensures that both programmers and designers can contribute to the AI logic effectively.
Flexible and Efficient AI Architectures
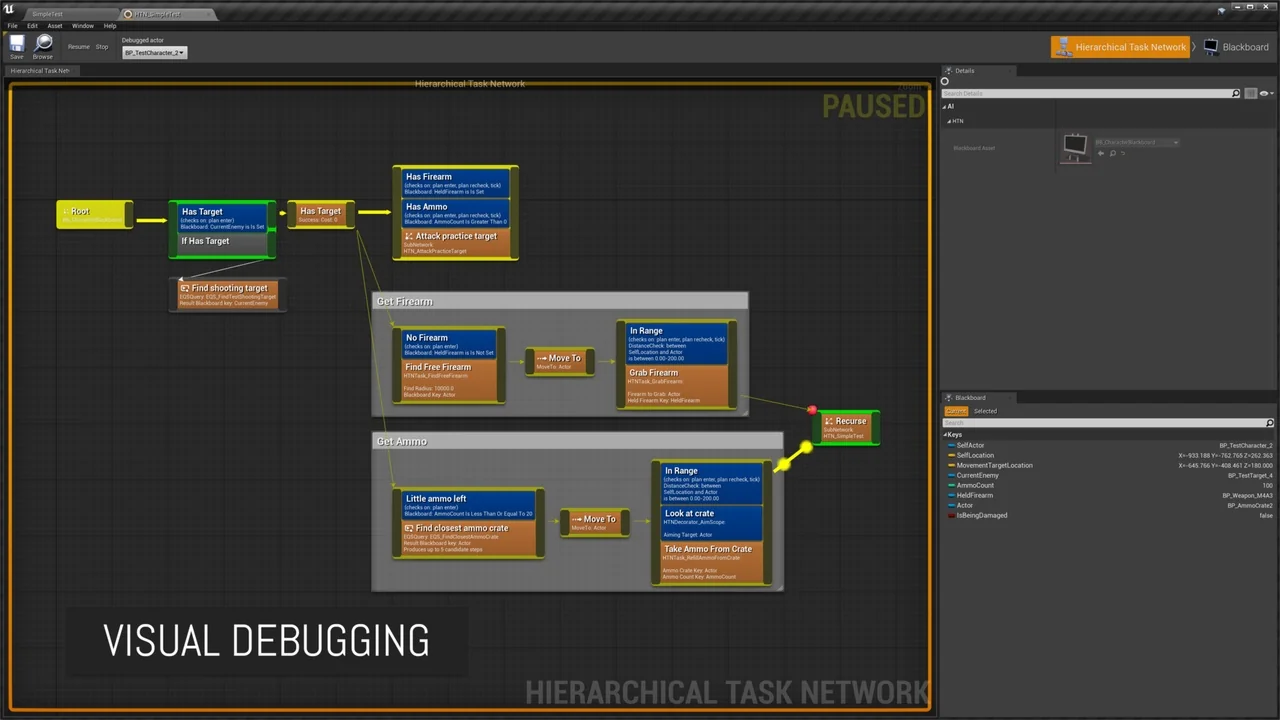
A core component of the Hierarchical Task Network Planning AI is its use of Blackboard data. The planner stores knowledge about possible future worldstates within this system. During the planning phase, nodes check and modify these values to make decisions based on potential future outcomes. This predictive capability allows for much more realistic character behavior.
Efficiency is a major advantage of this planning technique. The planner quickly identifies the path with the lowest cost or the highest priority. Compared to Goal-Oriented Action Planning (GOAP), this system offers significantly more control while remaining highly performant. Therefore, it is suitable for projects requiring many active agents.
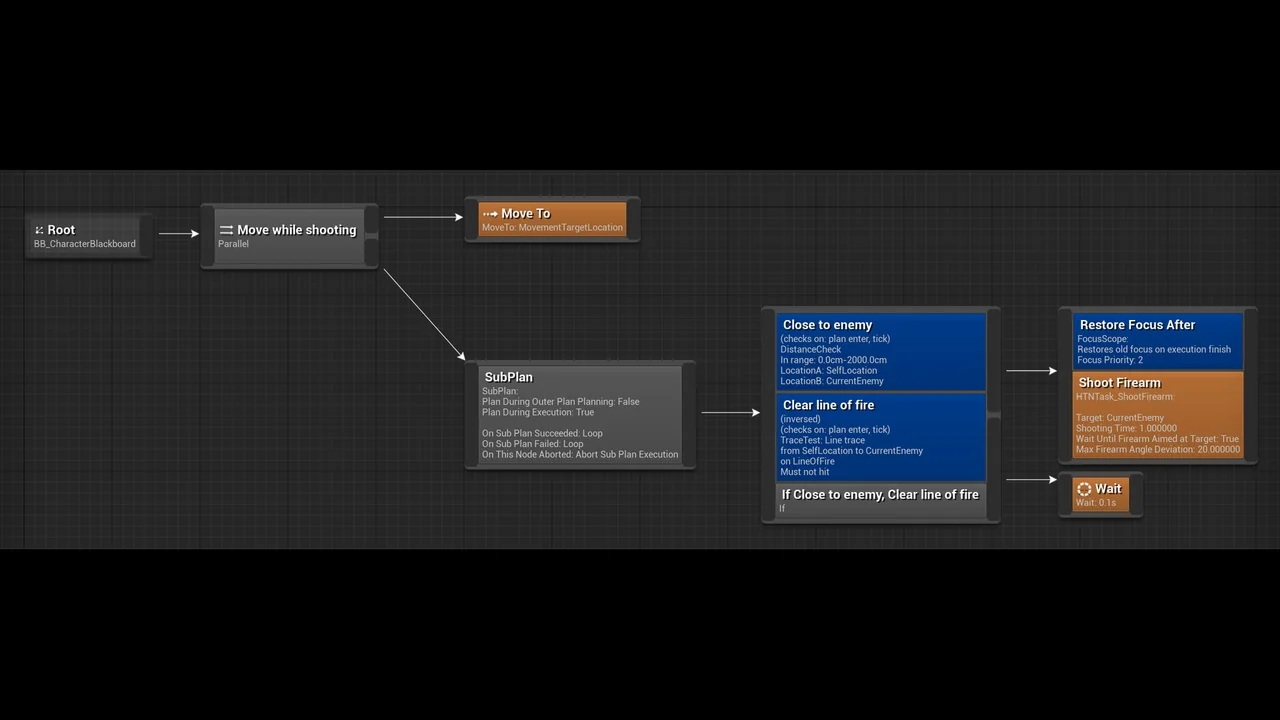
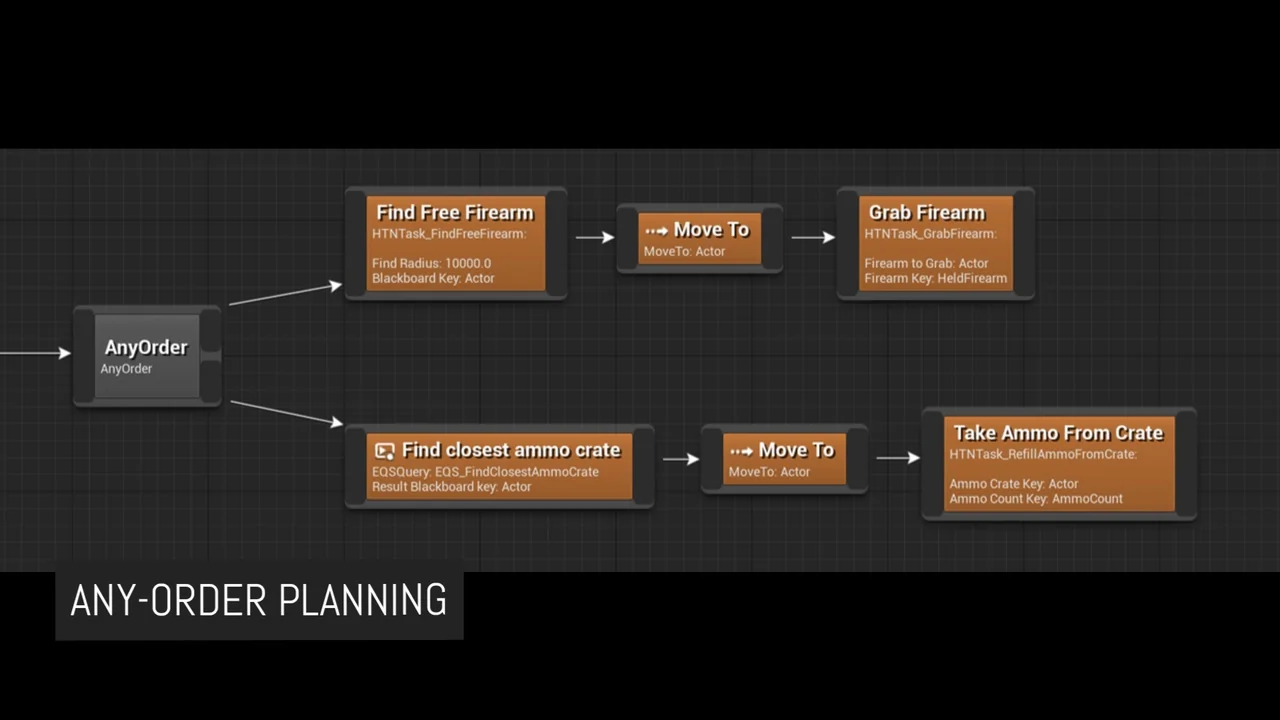
Moreover, the tool provides a unique balance between rigidity and flexibility. It can function as strictly as a Behavior Tree or as freely as GOAP. Developers can create AI that follows predefined sequences or characters that are free to arrange tasks in any order to achieve their goals. You can customize the level of autonomy to fit your specific game design needs.
Comprehensive Features and Integration
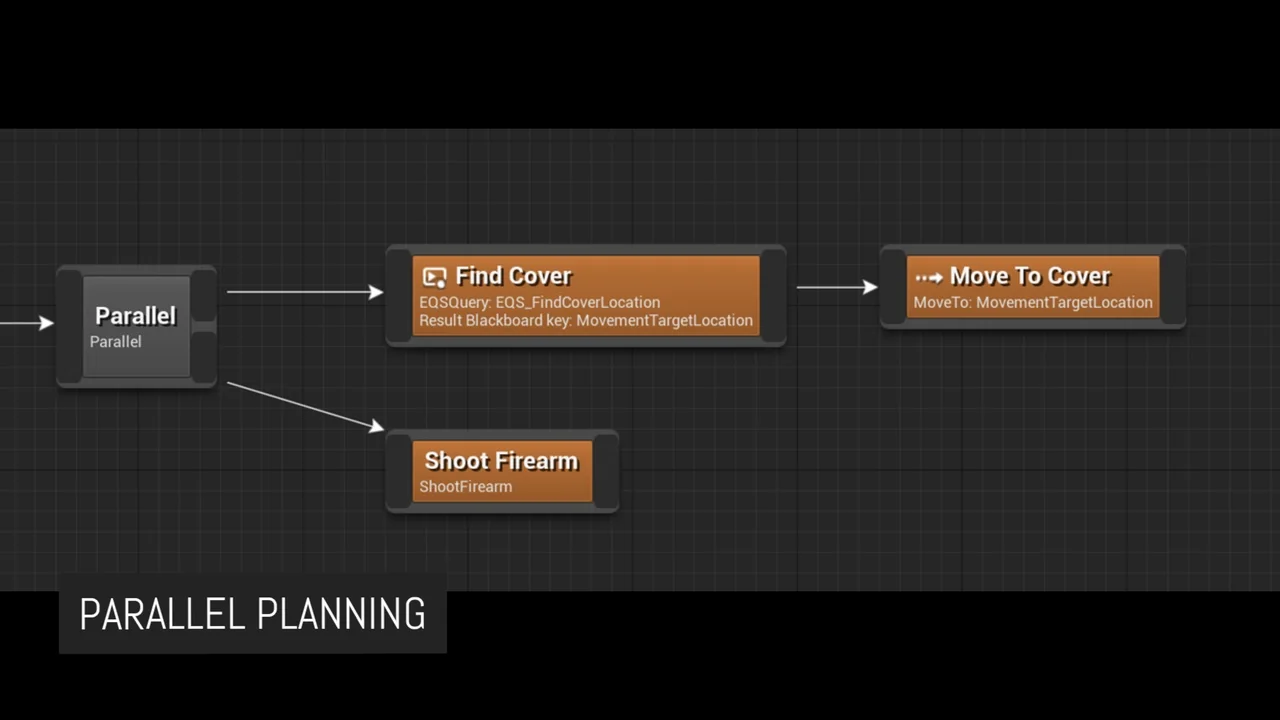
Advanced features include the ability to create composable behaviors via subnetworks. Furthermore, the system supports parallel planning and any-order planning for complex decision-making. Developers can also make subplans within larger plans to mix long-term goals with on-the-fly reactions. This ensures the AI remains responsive to a changing environment.
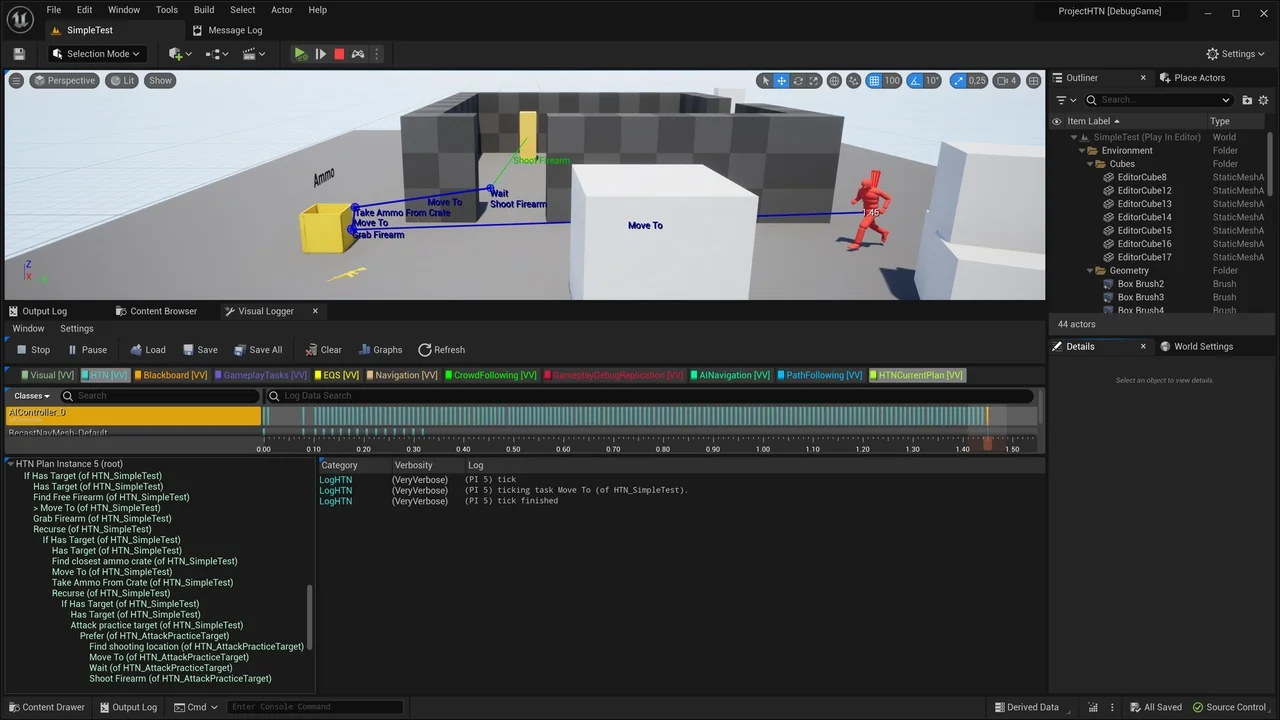
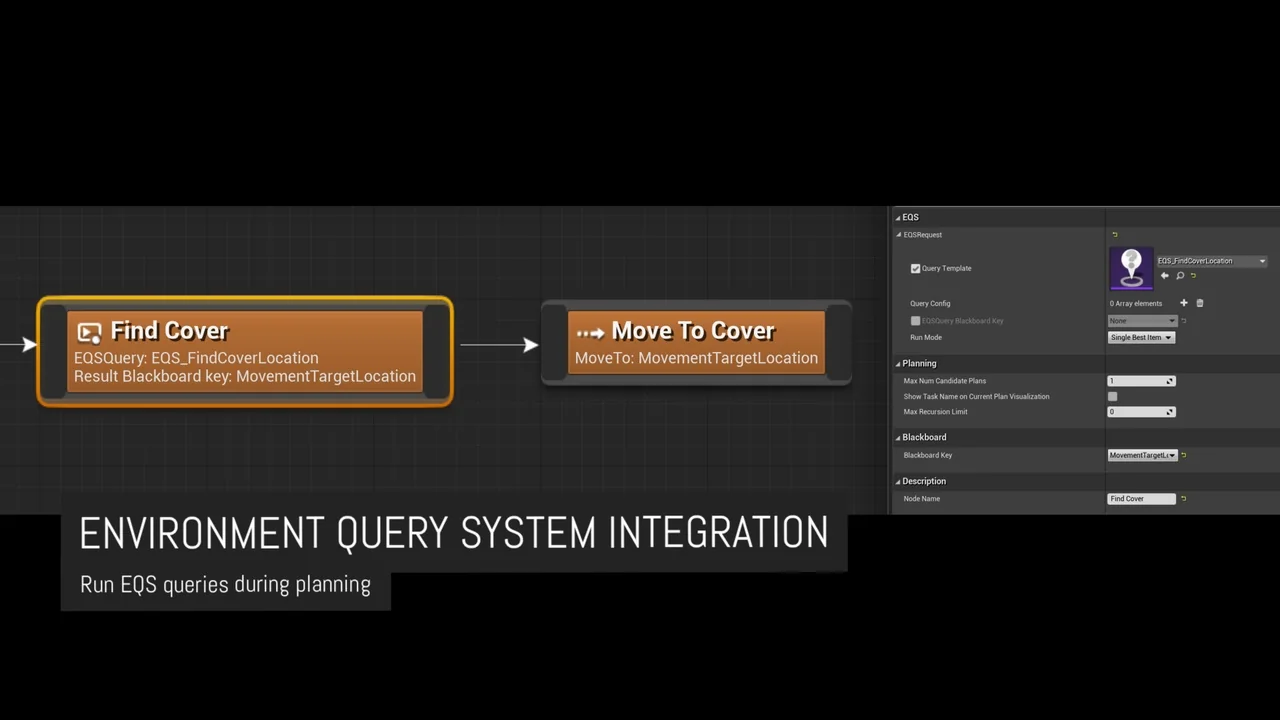
Hierarchical Task Network Planning AI integrates seamlessly with existing engine tools like the Visual Logger and the Environment Query System (EQS). These integrations assist with complex movement planning and real-time debugging. Additionally, the creator provides full source code access for those who need to extend the HTN component using custom extensions.
Conclusion
This plugin offers a robust framework for developers seeking more than simple reactive AI. By combining the efficiency of HTN with a user-friendly visual editor, it streamlines the creation of tactical and autonomous characters. Whether you need rigid sequences or flexible problem-solving, this toolkit provides the necessary control for modern game AI.
Screenshots & Gallery